

Schwerpunkte der Bewegungsforschung in Jena
Unsere Forschungsinteressen erscheinen bei der Betrachtung der zahlreichen Projekte in dieser Datenbank breit gefächert, doch sind sie alle durch die grundlegende Frage nach der Evolution des Bewegungssystems verbunden. Wir suchen nach den funktionellen und strukturellen Bedingungen, welche der großen Vielfalt von Bewegungsweisen innerhalb der Landwirbeltiere zugrunde liegen. Unser funktionsmorphologischer Ansatz sieht das Bewegungssystem und die Möglichkeiten seiner Anpassung an die spezifischen Erfordernisse der jeweiligen Umwelt einer Tierart stets vor dem Hintergrund einer Phylogenie-Hypothese. Diese Perspektive auf das evolutive Erbe und die Grenzen, die es einer Anpassung setzt, bestimmt maßgeblich die Möglichkeit, biologische Lösungsprinzipien in die Technik zu übertragen. Die für biologische Strukturen bestimmende Multifunktionalität widerspricht den meist uni- bis oligofunktionalen, technischen Systemen.
Fortbewegung kleiner Säugetiere
Aus verschiedenen Gruppen der Säugetiere wurden unter anderem Hunde (Canis lupus f. familiaris), Beutelratten (Dasyuroides byrnei, Monodelphis domestica), Spitzhörnchen (Tupaia glis), Hasenartige (Ochotona rufescens), Nager (Galea musteloides, Rattus norvegicus), Marder (Mustela putorius f. furo), Rüsselspringer (Macroscelides proboscideus), Klippschliefer (Procavia capensis) und kleine Affen (Eulemur fulvus, Microcebus murinus, Saguinus oedipus, Saimiri sciureus) untersucht. Sie alle gleichen sich in der Geometrie ihrer Beine: drei propulsive Elemente werden in einer Zickzack- Konfiguration geführt und die Hauptbewegung wird im obersten Drehpunkt erzeugt. Die zwangsgekoppelte Parallelführung von erstem und drittem Segment gleicht in ihrer Wirkung einem Pantographen, einem klassischen Zeichengerät, bei dem der Bewegungsumfang eines Elementes durch ein mobiles Mittelsegment auf ein drittes übertragen wird. Dabei bleibt die Winkelung gleich, der zurückgelegte Weg des distalen Punktes wird aber größer. Dieses Bewegungsprinzip ist für kleine Säugetiere besonders vorteilhaft, denn in ihren Lebensräumen ist jedweder Untergrund unübersichtlich und voller Hindernisse, der nächste Auffußort der Beine ist durch die Sinne häufig nicht antizipierbar. Die Beine arbeiten als Stoßdämpfer und verringern den Umfang vertikaler Bewegungen des Rumpfes. Für schnelle Fortbewegung in synchronen Gangarten wie Galopp oder Halfbound werden Rumpfbewegungen stattdessen ausgiebig genutzt. Durch Beugung und Streckung der Wirbelsäule in der Sagittalebene kann die Schrittlänge um mehr als 50 Prozent gesteigert werden.
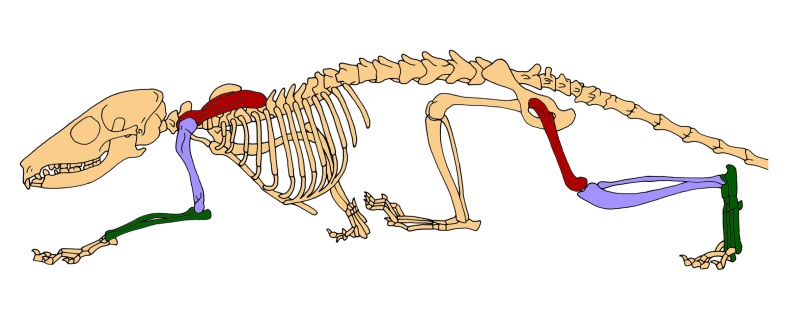
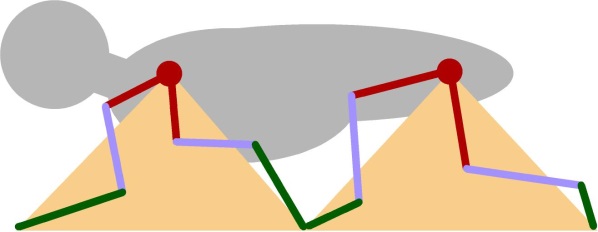
Prinzipien der Beinbewegung kleiner Säugetiere in symmetrischen Gangarten: Vorder- und Hintergliedmaßen bestehen aus drei propulsiven Elementen (+ Kontaktelemente), haben die gleiche funktionelle Länge, die gleiche Winkelbewegung und die gleiche Schrittlänge. Erstes und drittes Element werden jeweils parallel geführt.
These principles of limb geometry and limb movement are of particular importance for the dynamic stability of locomotion in small mammals, because of the notorious discontinuity of all the substrates on which they walk and run. Due to their body size, small mammals are limited in their capabilities to anticipate (by sensory input) the substrate properties of the next location for foot placement. Therefore, they have to accept the irregularities of the ground instead of circumvent them. In this context, the limbs work as dampers and reduce major vertical oscillations of the body axis and the head. As an alternative, mammals “invented” synchronous gaits such as bound, halfbound and gallop, which minimize the potentially disturbing substrate contacts. Synchronous gaits involve comprehensive flexion and extension of the lumbar spine in the sagittal plane, which may contribute up to 50 percent to the stride length of the animal.
Verbundprojekte und Kooperationen:
DFG Innovationskolleg „Bewegungssysteme“ (1996-2001):
- Prof. Dr. Reinhard Blickhan, LS für Biomechanik, Institut für Sportwissenschaften, FSU Jena
- Prof. Dr. Hans-Christoph Scholle, Klinik für Unfall-, Hand- und Wiederherstellungschirurgie, UK Jena
- Prof. Dr. Klaus Zimmermann, Fachbereich Technischer Maschinenbau, TU Ilmenau
Kompetenzzentrum für Interdisziplinäre Prävention (KIP) (seit 2002)
- Prof. Dr. Romano Grieshaber, Isabell Dienstbühl Berufsgenossenschaft Nahrungsmittel und Gaststätten (BGN)
- Dr. Christian Puta, LS für Sportmedizin und Gesundheitsförderung, Institut für Sportwissenschaften, FSU Jena
- Dr. Christoph Anders, Prof. Dr. Hans-Christoph Scholle, Klinik für Unfall-, Hand- und Wiederherstellungschirurgie, UK Jena
Ausgewählte Publikationen:
- Fischer, M.S. (1994): Crouched posture and high fulcrum, a principle in the locomotion of small mammals: The example of the Rock Hyrax (Procavia capensis) (Mammalia: Hyracoidea). J.Human Evol. 26, 501-524.
- Fischer, M.S., Blickhan, R. (2006): The tri-segmented limbs of therian mammals: kinematics, dynamics, and self-stabilization. A review. J. Exp. Zool. 305A, 935-952.
- Fischer, M.S., Schilling, N., Schmidt, M., Witte, H. (2002): Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338.
- Schilling, N. (2005): Ontogenetic development of locomotion in small mammals – a kinematic study. J. Exp. Biol. 208, 4013-4034.
- Schilling, N., Arnold, D., Wagner, H., Fischer, M.S (2005): Evolutionary aspects and muscular properties of the trunk - implications for human low back pain. Pathophysiology 12, 233-242.
- Schmidt, M. (2008): Forelimb proportions and kinematics: How are small primates different from other small mammals? J. Exp. Biol. 211, 3775-3789.
- Schmidt, M., Fischer, M.S. (2009): Morphological integration in mammalian limb proportions: dissociation between function and development. Evolution 63, 749-766.
- Scholle, H.-Ch., Schumann, N.P., Biedermann, F., Roeleveld, K., Stegeman, D.F., Graßme, R., Schilling, N., Fischer, M.S. (2001): Spatio-temporal surface EMG characteristics from rat triceps brachii muscle during treadmill locomotion indicate selective recruitment of functionally distinct muscle regions. Exp. Brain Res. 138, 26-36.
- Witte, H., Biltzinger, J., Hackert, R., Schilling, N., Schmidt, M., Reich, C., Fischer, M.S. (2002): Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353.
Laufmaschinen, Kletterroboter, Sensorik und neuronale Kontrolle
Die Robustheit der Bewegung kleiner Säugetiere, ihre dynamische Selbststabilität gegenüber externen Störungen, hat die Ingenieurwissenschaften schon früh inspiriert, beispielsweise zur Entwicklung von Beingeometrien für Laufmaschinen. Neigungsabhängige Veränderungen der Fortbewegung bei Ratten, kleinen Affen und beim Chamäleon wurden untersucht, um basierend auf dem Spektrum biologischer Lösungen einen kleinen Kletterroboter zu entwickelt. Aktuell stehen Fragen nach der neuronalen Kontrolle und dem Einfluss sensorischer Informationen im Mittelpunkt der Kooperationen mit den Ingenieurwissenschaften. Am Beispiel der Ratte wird untersucht, wie schnell das Bewegungssystem auf eine unvorhergesehene Störung reagieren kann oder wie sich Bewegungsmuster ändern, wenn bestimmte Sinnesinformationen nicht verfügbar sind.


Schwieriges Substrat: Ratten laufen über eine Falltür, deren Absenkung über die Bodenreaktionskraft des Beines gesteuert wird (oben) oder auf einem perforierten Laufband. Elektroden messen die Aktivität des M. triceps brachii und des M. biceps, beide kontrollieren das Ellbogengelenk. Der M. triceps „misst“ außerdem die funktionelle Länge des Beines.
Verbundprojekte und Kooperationen:
DFG Schwerpunktprogramm „Autonomes Laufen“ (1997-2003):
- Prof. Dr. Reinhard Blickhan, LS für Biomechanik, Institut für Sportwissenschaften, FSU Jena
- Prof. Dr. Ansgar Büschges, LS Neurobiologie/Tierphysiologie, Universität Köln
- Prof. Dr. Holk Cruse, Biologische Kybernetik, Universität Bielefeld
- Prof. Dr. Rüdiger Dillmann, Karlsruher Institut für Technologie
- Prof. Dr. Friedrich Pfeiffer, LS Angewandte Mechanik, TU München
BMBF Verbundprojekt „Inspirat - Entwicklung eines bionisch inspirierten Kletterroboters für die externe Inspektion linearer Strukturen“ (2006-2011)
- Prof. Dr. Stanislav N. Gorb, FB Funktionelle Morphologie und Biomechanik, Universität Kiel
- Dr. Andreas Karguth, Tetra GmbH Ilmenau
- Prof. Dr. Hartmut Witte, FB Biomechatronik, TU Ilmenau
FESTO AG Bionic Learning Network „AirArm – pneumatische 4-Achs-Kinematik mit inhärenter Nachgiebigkeit“
- Wilfried Stoll, Aufsichtsratsvorsitzender der Festo AG
- Univ.-Prof. Dipl.-Ing. Axel Thallemer, Univ.-Prof. Dipl.-Ing. Martin Danzer, Universität für industrielle und künstlerische Gestaltung Linz: Studienrichtung Industrial Design/scionic®
- Prof. Dr. Hartmut Witte, FB Biomechatronik, TU Ilmenau
- Prof. Dr.-Ing. habil. Christoph Ament, Institut für Automatisierungs- und Systemtechnik
DARPA „Biologically-based network controller for dynamic legged locomotion“ (2010-2012)
- Prof. Dr. Ansgar Büschges, LS Neurobiologie/Tierphysiologie, Universität Köln
- Prof. Dr. Roger Quinn, Biologically Inspired Robotics, Case Western Reserve University, Cleveland
- Prof. Dr. Roy Ritzmann, Dept. of Biology, Case Western Reserve University, Cleveland
DFG Verbundprojekt „Technische, nicht-visuelle Charakterisierung von Substratkontakten nach dem biologischen Vorbild carpaler Vibrissen“
- Prof. Dr. Hartmut Witte, FB Biomechatronik, TU Ilmenau
- Prof. Dr. Klaus Zimmermann, FB Technischer Maschinenbau, TU Ilmenau
Ausgewählte Publikationen:
- Fischer, M.S, Gorb, S., Karguth, A., Witte, H. (2010): InspiRat - Biologisch inspirierter Kletterroboter für die externe Inspektion linearer Strukturen. BBMTR Bd. 8: 1-168.
- Hunt, A., Schmidt, M., Arnold, D., Fischer, M., Quinn, R. (2014): Dynamic simulation of inter-leg controller for tetrapod coordination. In: Biomimetic and Biohybrid Systems. Lecture Notes in Computer Science Volume 8608, 142-153.
- Hunt, A. J., Szczecinski, N.S. Andrada, E., Fischer, M.S. Quinn, R.D. (2015): Using animal data and neural dynamics to reverse engineer a neuromechanical rat model. Living Machines
- Mämpel, J., Andrada, E., Witte, H., Trommer, C., Schweitzer, M., Karguth, A., Schmidt, A., Fischer, M.S (2010): Mechanical design of a climbing robot based on biomechanical analyses. Emerging Trends in Mobile Robotics, 367-374.
- Niederschuh, S.; Witte, H.; Schmidt, M. (2015): The role of vibrissal sensing in forelimb position control during travelling locomotion in the rat (Rattus norvegicus, Rodentia). Zoology 118, 51-62.
- Ritzmann, R., Quinn, R.D., Fischer, M.S. (2004): Convergent evolution and locomotion through complex terrain by insects, vertebrates and robots. Arthropod Struct. Develop. 33, 361-379.
- Schmidt, M., Witte, H., Zimmermann, K., Niederschuh, S., Helbig, T., Voges, D., Husung, I., Volkova, T., Will, Ch., Behn, C., Steigenberger, J., Klauer, G. (2014): Technical, non-visual characterization of substrate contact using carpal vibrissae as a biological model: an overview. 58th Internationales Wissenschaftliches Kolloquium, Ilmenau. urn:nbn:de:gbv:ilm1-2014iwk-175:8.
- Thallemer, A., Ament, C., Danzer, M., Fischer, M.S., Witte, M.S. (2009): AirArm – an anthropofunctional robot arm with inherent flexibility. Proc. 3rd International Symposium on Mobiligence.
- Witte, H., Hackert, R., Ilg, W., Biltzinger, J., Schilling, N., Biedermann, F., Jergas, M., Preuschoft, H. & Fischer, M. S. 2000 Quadrupedal Mammals as Paragons for Walking Machines. Proc. AMAM (Adaptive Motion in Animals and Machines) Montreal 8.-12-8.2000,
- Witte, H., Ilg, W., Hackert, R., Seyfarth, A., Dillmann, R. & Fischer, M.S. 2001 Design criteria for the leg of a walking machine derived by biological inspiration from quadrupedal mammals. In: Berns, K. & Dillmann, R. (Hrsg.): Proc. 4th International Conference on Cilmbing and Walking Robots CLAWAR, Karlsruhe, 63-68
Hunde in Bewegung
Hunderassen sind ein geeignetes Modellsystem, um die unmittelbaren Auswirkungen der Variation von Strukturen – erzeugt durch
künstliche Zuchtwahl – auf deren Funktionsweise zu erforschen. Im Rahmen der Jenaer Hundestudie, gefördert von der Gesellschaft für
Kynologische Forschung (GKF), der DFG, den Zuchtverbänden und dem Verband für das deutsche Hundewesen (VDH) wurde die Fortbewegung
von 32 Hunderassen mit der Frage nach dem Einfluss der Körpergröße und der augenscheinlich verschiedenen Körperproportionen auf die
Bewegungsweise der Gliedmaßen untersucht. In Anbetracht der Erwartung großer Unterschiede war die Einheitlichkeit der Beingeometrie
in einem Größenspektrum von 2 kg bis über 70 kg verblüffend. Möglichkeit zur Veränderung innerhalb der Art scheint zwar für die
Körpergröße gegeben, doch die Proportionen, die wiederum die Kinematik der Beine bestimmen, sind nur durch die Veränderung des
Wachstumsprogrammes veränderbar. Aber selbst kurzbeinige Rassen weichen nicht vom Bewegungsmuster der anderen Hunde ab.
In einer grundlegenden Studie zu Rückenbewegungen wurden erstmals detailliert der Umfang und die Lokalistation von Bewegungen in der
Lumbalwirbelsäule während symmetrischer Gangarten untersucht. Darauf aufbauend kam es zu einem großen Kooperationsprojekt, in dem
250 Hunde in den nächsten Jahren in Zusammenarbeit mit Tiermedizinern aus Gießen und Bern untersucht werden. In der 2014 begonnenen
„HEEL-Studie zur Gelenkdynamik von Hunden“ werden erstmals die dreidimensionale Kinematik der Gliedmaßen und eine inverse Dynamik
der Vorder- und Hintergliedmaßen ermittelt und berechnet.
Verbundprojekte und Kooperationen:
HEEL „Studie zur Gelenkdynamik von Hunden“:
- Prof. Dr. Ingo Nolte, Tierärztliche Hochschule Hannover
AOVET “3-Dimensional In-vivo Biomechanics of the Canine Occipitoatlantoaxial, Thoracic and Lumbosacral Spine”
- PD Dr. Martin Schmidt, Dr. Nele Ondreka, Klinik für Kleintiere, Justus-Liebig-Universität
- Prof Dr. Franck Forterre, Kleintierklinik, Vetsuisse Fakultät Bern
Ausgewählte Publikationen:
- Deban, S.M.; Schilling, N. & Carrier, D.R. (2012): Activity of extrinsic muscles in dogs at walk, trot and gallop. J. Exp. Biol. 215: 287-300.
- Fischer, M.S., Lilje, K.E. 2011. Hunde in Bewegung / Dogs in motion. VDH Service GmbH und Franckh-Kosmos Verlags-GmbH & Co. KG, Stuttgart. 208 Seiten.
- Fischer, S.; Nolte, I. & Schilling, N. (2013): Adaptations in muscle activity to induced, short-term hindlimb lameness in trotting dogs. Plos One 8: e80987.
- Rey, J., Fischer, M.S., Böttcher, P. (2014): Sagittal joint instability in the cranial cruciate ligament insufficient canine stifle. Caudal slippage of the femur and not cranial tibial subluxation. Tierärztliche Praxis Kleintiere 3: 151-156.
- Schilling, N. & Carrier, D.R. (2010): Function of the epaxial muscles in walking, trotting, and galloping dogs: Implications for the evolution of epaxial muscle function in tetrapods. J. Exp. Biol. 213: 1490-1502.
Diagnostisches Potenzial der Bewegungsanalyse
Auch Tiermodelle der medizinischen Grundlagenforschung, Ratten und Mäuse, liefern Einsichten in die innerartliche Veränderbarkeit von Bewegungsfunktionen. Experimentell induzierte Störungen, wie beispielsweise ein Schlaganfall im motorischen Cortex, eine Gelenkerkrankung oder ein veränderter Genotyp ermöglichen die Erforschung der physiologischen und funktionellen Plastizität im Individuum. Gleichzeitig liefert eine detaillierte Bewegungsanalyse eine Fülle von messbaren Parametern, die für die Differenzierung von pharmakologischen Wirkungen auf ein bestimmtes Krankheitsbild oder für die Charakterisierung des Phänotyps transgener Tiere verwendet werden können.
Verbundprojekte und Kooperationen:
Reichen und Greifen nach Läsionen im sensomotorischen Cortex der Ratte
- Prof. Dr. Hans-Christoph Scholle, Klinik für Unfall-, Hand- und Wiederherstellungschirurgie, UK Jena
- Prof. Dr. Otto Witte, Dr. Marcel Knieling, Hans-Berger-Klinik für Neurologie, UK Jena
Diagnostisches Potenzial der Bewegungsanalyse bei schmerzhaften Gelenkerkrankungen
- Dr. Michael Böttger, Bayer Schering Pharma AG, Wuppertal
- Dr. Johannes Leuchtweis, Institut für Physiologie I, FSU Jena
Charakterisierung der Phänotyps transgener Mäuse
- Prof. Dr. Christoph Englert, Danny Schnerwitzki, Forschungsgruppe Molekulare Genetik, Leibniz-Institut für Altersforschung: Fritz-Lipmann-Institut e.V. Jena
Ausgewählte Publikationen:
- Böttger, M.K., Leuchtweis, J., Schaible, H.-G., Schmidt, M. 2011. Videoradiographic analysis of the range of motion in unilateral experimental knee joint arthritis in rats. Arthritis Research and Therapy 13, R79.
Idiomotion der Säugetiere
Lokomotion nimmt zumeist nur einen geringen Teil der Tagesaktivität von Säugetieren ein, dominierend ist die Idiomotion, das Repertoire von Bewegungsweisen, die auf das Tier selbst oder auf Artgenossen gerichtet sind. Idiomotorische Bewegungen spielen im Komfortverhalten eine große Rolle. Putzen und Kratzen verschiedener Körperregionen stellen Ansprüche, die von der Lokomotion nicht ausgehen, und die Beweglichkeit vieler Gelenke scheint durch Anpassungen an die Fellpflege oder andere idiomotorische Aktivitäten stärker geprägt. Noch sind nur wenige Arten im Hinblick auf die Kinematik ihrer idiomotorischen Bewegungen untersucht, allgemeine Prinzipien können daher noch nicht identifiziert werden.
Bipede Fortbewegung der Vögel
Durch den Vergleich von 7 Arten (Corvus monedula, Coturnix coturnix, Eudromia elegans, Gallus gallus, Haematopus ostralegus,
Recurvirostra avosetta, Vanellus
vanellus) wurden auch in der Laufbewegung der Vögel gemeinsame Bewegungsprinzipien im Hinblick auf
die Geometrie der Beine und die
Biomechanik
identifiziert. So gibt es bei Vögeln wie auch bei quadrupeden Säugetieren – aber im
Unterschied zum Zweibeiner Mensch –
keine klare
Trennung zwischen Pendelmechanik und Feder-Masse-Mechanik in der Führung des
Körperschwerpunktes, wobei die
Feder-Masse-Mechanik bei
allen Laufgeschwindigkeiten dominiert. Eine Besonderheit der Vögel ist jedoch
eine ausgeprägtere
Rollenverteilung zwischen den
Gelenken eines Beines. Vor allem das Intertarsalgelenk beeinflusst durch seine
Steifigkeit die
Eigenschaften des gesamten Beines und
seine Wirkung auf den Rumpf. Hierin gleich die Mechanik eher dem menschlichen
Bein, in dem
ebenfalls die lokalen Steifigkeiten
unterschiedlich sein können. Ein anderer Aspekt der Studie betrachtet den Einfluss
der
Körpergröße auf die innerartliche Variation
der Bewegungsfunktionen bei verschiedenen Hühnerrassen.
Ein weiteres Anliegen dieses Projektes besteht in der Entwicklung von Methoden der automatisierten Auswertung
röntgenvideographischer
Aufnahmen. Erstmals konnte eine enorm große Menge Bildmaterial (7749 Schritte und damit 1.267.320
Einzelbilder) vollständig
analysiert werden, womit die bisweilen subjektive Auswahl der „besten“ Bewegungssequenzen entfällt. Auch
die Möglichkeit der
automatisierten Auswahl wird zunehmend dem Spektrum der Variation größere Aufmerksamkeit zukommen lassen.
Verbundprojekte und Kooperationen:
DFG-Verbundprojekt „Lokomotion der Vögel“ (seit 2009)
- Prof. Dr. Reinhard Blickhan, LS für Biomechanik, Institut für Sportwissenschaften, FSU Jena
- Prof. Dr. Joachim Denzler, LS für Digitale Bildverarbeitung, Institut für Mathematik, FSU Jena
Ausgewählte Publikationen:
- Andrada, E., Nyakatura, J.A., Bergmann, F., Blickhan, R. (2012): Adjustments of global and local hindlimb properties during terrestrial locomotion of the common quail (Coturnix coturnix). J. Exp. Biol. 216, 3906-3916.
- Andrada, E., Rode, C., Sutedja, Y., Nyakatura, J.A., Blickhan, R. (2014): Trunk orientation causes asymmetries in leg function in small bird terrestrial locomotion. Proc. Biol. Sci. 281, pii: 20141405. doi: 10.1098/rspb.2014.1405.
- Haase, D., Andrada, E., Nyakatura, J.A., Kilbourne, B.M., Denzler, J. (2013). Automated approximation of center of mass position in X-ray sequences of animal locomotion. J. Biomech. 46, 2082-2086.
- Nyakatura J.A., Andrada E., Grimm N., Weise H., Fischer M.S. (2012): Kinematics and center of mass mechanics during terrestrial locomotion in northern lapwings (Vanellus vanellus, Charadriiformes). J. Exp. Zool. 317A, 580-594.
- Ogihara, N., Oku, T., Andrada, E., Blickhan, R., Nyakatura, J.A., Fischer, M.S. (2014): Planar covariation of limb elevation angles during bipedal locomotion in common quails (Coturnix coturnix). J. Exp. Biol. 217: 3968-3973.
- Stößel, A., Fischer, M.S. (2012): Comparative intralimb coordination of avian bipedal locomotion. J. Exp. Biol 215, 4055-4069.
- Stößel, A., Kilbourne, B., Fischer, M.S. (2013): Morphological integration vs. ecological plasticity in the avian pelvic limb skeleton. J. Morph. 274, 483-495.
Rekonstruktion der Lokomotion fossiler Landwirbeltiere
Vergleichende Studien der Fortbewegung heutiger Arten können die Rekonstruktion der Bewegungsweise längst ausgestorbener Tiere unterstützen. Ein solches Vorhaben wurde gemeinsam mit dem Museum der Natur in Gotha umgesetzt, wo die berühmten „Ursaurier“ der Tambach-Formation, Stammgruppenvertreter der Amniota, wissenschaftlich untersucht wurden. Einzigartig an diesen Funden ist die gleichzeitige Erhaltung nahezu vollständiger Skelette und Fußspuren dieser Art. Gefördert von der Volkswagenstiftung wurden verschiedene Echsen, Salamander und sogar Alligatoren untersucht, um diejenigen Bewegungsweisen zu finden, welche die fossilen Spuren am besten erklären können.
Verbundprojekte und Kooperationen:
„Functional morphology of stem group amniotes“ (seit 2012), gefördert durch die VW-Stiftung
- Dr. Thomas Martens, Museum der Natur Gotha, Stiftung Schloss Friedenstein Gotha
- Vivian Allen, Structure & Motion Laboratory, The Royal Veterinary College, University of London
Ausgewählte Publikationen:
- Arnold, P., Fischer, M.S., Nyakatura, J.A. (2014): Soft tissue influence on ex vivo mobility in the hip of Iguana: comparison with in vivo movement and its bearing on joint motion of fossil sprawling tetrapods. J. Anat. 225, 31-41.
- Curth, S., Fischer, M.S., Nyakatura, J.A. (2013): Ichnology of an Extant Belly-Dragging Lizard – Analogies to Early Reptile Locomotion? Ichnos 21:1, 32-43.
- Nyakatura, J.A., Andrada, E., Curth, S., Fischer, M.S. (2014): Bridging “Romer’s Gap”: Limb mechanics of an extant belly-dragging lizard inform debate on tetrapod locomotion during the Early Carboniferous. Evol. Biol. 41, 175-190.
Nahrungsaufnahme und Mastikation
Dieser Schwerpunkt widmet sich der Evolution des Kopfes, insbesondere des Kieferapparates und des Gebisses. Am Modell der
Hunderassen wird untersucht, wie die Bewegungen des Kiefers und die Kaukräfte Einfluss auf die Form der Zähne, den Zahnhalteapparat,
die Kaumuskulatur und Gestalt des Schädels nehmen.
Ein anderes Projekt erforscht die Nahrungsaufnahme bei Schwanzlurchen im Wasser und an Land, um aus einem Analogievergleich
Rückschlüsse auf die Evolution der Nahrungsaufnahme bei den ersten Landwirbeltieren zu ziehen.
Verbundprojekte und Kooperationen:
- Kornelius Kupczik, Max Planck Weizmann Center for Integrative Archaeology and Anthropology, MPI Evolutionäre Anthropologie, Leipzig
Ausgewählte Publikationen:
- Heiss, E., Aerts, P., Van Wassenbergh, S. (2015) Flexibility is everything: prey capture throughout the seasonal habitat switches in the smooth newt Lissotriton vulgaris. Organisms Diversity and Evolution 15, 127-142.
- Kupczik, K., Fischer, M.S. (2012) „Großmutter, warum hast du so große Zähne?“ Bezahnung und Kaufunktion beim Hund und Wolf. Unser Rassehund 11/2012.
- Fischer, M.S., Kupczik, K. (2013) Auf den Zahn gefühlt: Die Beißkraft von Hund und Wolf. Der Hund 2/2013.
Projekte anderer Institutionen
Auswärtige Forschergruppen nutzen regelmäßig die Möglichkeiten der hochauflösenden Röntgenvideographie in Jena im Rahmen ihrer eigenen Projekte, beispielsweise um die Lauterzeugung bei Singvögeln oder die Kopf- und Halsrotationen bei Schleiereulen zu beobachten. Die Speibewegungen von Kobras wurden röntgenvideographisch untersucht, ein Biber wurde beim Nagen gefilmt. Von großem Nutzen ist die Technik auch für die Erprobung neuer Operationstechniken im Tiermodell.
Gastwissenschaftlerinnen und Gastwissenschaftler:
- Dr. Ruben A. Berthé, Rheinische Friedrich-Wilhelms-Universität Bonn
- Dr. Wolfgang Bothe, Klinik für Herz- und Thoraxchirurgie, UK Jena
- Prof. Dr. Peter Böttcher, Universitätsklinik für Kleintiere, Leipzig
- Dr. Steven Deban, University of South Florida, Tampa
- Prof. Dr. Franz Goller, Interdepartmental Program in Neuroscience, University of Utah
- Dr. Markus Fischer, Bionic Learning Network, FESTO Esslingen
- Prof. Dr. Alexander Haas, Zoologisches Institut, Universität Hamburg
- Prof. Dr. John Hutchinson, Structure & Motion Laboratory, Royal Veterinary College, University of London
- Prof. Dr. Auke J. Ijspeert, Dr. Konstantinos Karakasiliotis, Biorobotics Laboratory, École polytechnique fédérale de Lausanne
- Prof. Dr. Thomas Kamradt, Institut für Immunologie, UK Jena
- Dr. Ingo Pfeil, Tierärztliche Klinik Dresdner Heide, Dresden
- Dr. Clara Stefen, Senckenberg Naturhistorische Sammlungen Dresden
- Prof. Dr. Hermann Wagner, Institut für Zoologie, RWTH Aachen
- Dr. Tim Wehner, Institut für Unfallchirurgische Forschung und Biomechanik, Universität Ulm
Gastwissenschaftlerinnen und Gastwissenschaftler:
- Deban, S.M, Schilling, N. (2009): Activity of trunk muscles during aquatic and terrestrial locomotion in Ambystoma maculatum. J. Exp. Biol. 212, 2949-2959.
- Griep, S., Schilling, N., Marshall, P., Amling, G., Hahne, L.M., Haas, A. (2013): Pectoral girdle movements and the role of the glenohumeral joint during landing in the toad, Rhinella marina (Linnaeus, 1758). Zoomorphology 132, 325-338.
- Karakasiliotis, K., Schilling, N., Cabelguen, J.-M., Ijspeert, A.J. (2013): Where are we in understanding salamander locomotion? Biological and robotic perspectives on the kinematics. Biol. Cybern. 107, 529-544.
- Krings, M., Nyakatura, J.A., Fischer, M.S., Wagner, H. (2014): The cervical spine of the American barn owl (Tyto furcata pratincola): I. Anatomy of the vertebrae and regionalization in their S-shaped arrangement. PLoS ONE 03/2014, 9e91653. doi:10.1371
- Riede, T., Schilling, N., Goller, F. (2013): The acoustic effect of vocal tract adjustments in zebra finches. J. Comp. Physiol. A 199, 57-69.Stefen, C., Ibe, P., Fischer, M.S. (2011): Biplanar x-ray motion analysis of the lower jaw movement during incisor interaction and mastication in the beaver (Castor fiber L. 1758). Mamm. Biol. 76, 534-539.
